Создание цифровых двойников с помощью дронов.
Цифровизация происходит в различных отраслях промышленности, и частью этого процесса является создание цифровых двойников физических объектов. Цифровой двойник – это цифровое представление физического объекта, которое может включать в себя 3D-модель и другие данные датчиков. Цифровые двойники используются для мониторинга, управления и обслуживания физических активов.
Создание цифрового двойника
Дроны играют важную роль в предоставлении данных для создания цифрового двойника. Камеры могут быть установлены в любом месте объекта, что выгодно с точки зрения скорости, частоты и безопасности. Данные с дронов используются для создания 3D-моделей и осмотра объектов с помощью фотограмметрических методов.
С помощью дронов сложно собрать высококачественные данные для создания 3D-моделей высокого разрешения, особенно для некоторых объектов, таких как два больших здания в городской среде.
Для получения профессиональных 3D-моделей требуется пилот, способный снимать изображения особым образом, включая управление такими переменными, как перекрытие изображений, угол наклона камеры, расстояние выборки и экспозиция внешнего изображения каждого здания. Пилоту необходимо сбалансировать все эти факторы, а также учитывать окружающую обстановку, соблюдать правила и обеспечивать безопасность.
Как же безопасно получить необходимые изображения в сложных местах, таких как два здания в городской среде? Ответ – использовать автоматический полет.

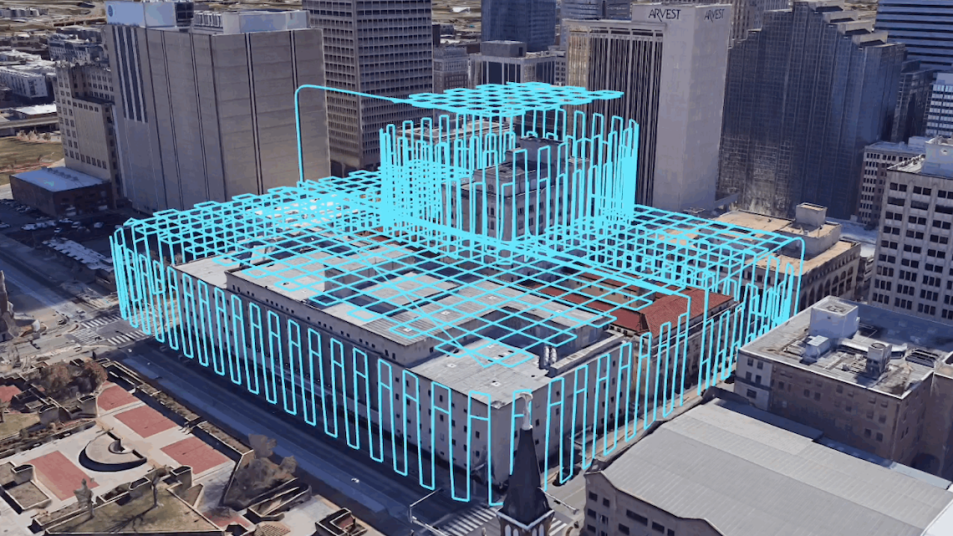
Предварительный просмотр плана миссии Dronelink 3D в Google Earth
Вертикальное картографирование фасадов и картографирование поперечных штрихов с помощью Dronelink, программного обеспечения для управления полетом, совместимого с дронами DJI, было использовано для автоматического сбора данных для создания цифровых двойников Оклахомского окружного суда и Федерального судебного учебного центра/Мемориального зала.
Использование автоматизированного полета было очень важно для Paper Airplane. Компания занимается разработкой решений для беспилотных летательных аппаратов и имеет контракт на ряд проектов по осмотру, оценке и профилактическому обслуживанию этого исторического мемориала и реставрационного проекта. Безопасный и эффективный сбор высококачественных данных позволил компании получить высококачественный результат, который превзошел ожидания заказчика.

ПилотPaper Airplane управляет дроном для выполнения задания с крыши
Подготовка площадки
Компания Paper Airplane, специализирующаяся на услугах беспилотников, получила контракт на создание цифровых двойников Оклахомского окружного суда и Федерального судебного учебного центра/Мемориального зала. Целью проекта было сохранить и восстановить историческое значение этих зданий.
Здание расположено через дорогу от места взрыва федерального здания в Оклахома-Сити в 1995 году. В результате взрыва были повреждены 324 здания в радиусе 16 кварталов. Целью проекта было обследование двух зданий для оценки структурной целостности поврежденных участков и планирования профилактических работ, а также защита этого исторического здания от повреждений, вызванных предыдущими инцидентами.
В отличие от бинокля или наземных автоматизированных камер, которые предоставляют лишь ограниченную информацию о точном местоположении здания, его ограждающих конструкциях, каждом изображении и повреждениях, связанных с инцидентом, цифровая двойная 3D-модель стала идеальным решением для всех сторон. 3D-модель облегчает обнаружение и локализацию повреждений, поскольку изображения каждой соответствующей области могут быть получены с нескольких разных точек зрения.

3D-модель и многоракурсные изображения рассматриваемой территории
Цели проекта заключались в следующем
- Безопасное управление дроном для получения изображений всех крыш и наружных поверхностей.
- Обработать отдельные снимки и преобразовать их в высококачественные 3D-модели.
- Экспортировать 3D-сетки и облака точек здания.
- Предоставить данные архитектурному бюро, управляющему проектом.
- Помощь в импорте/внедрении моделей для инспекции/судебного разбирательства и реализации в BIM и программном обеспечении для моделирования.
- Предоставление облачного решения для широкого доступа персонала, который не располагает аппаратными ресурсами для отображения файлов.
- Предоставление проектных файлов, в которых повреждения соотносятся с местоположением внешнего облика здания.
Соображения, связанные с получением данных цифрового двойника
При планировании создания высококачественного цифрового двойника важно понимать ключевые факторы, связанные с захватом наилучших данных для использования в программном обеспечении для фотограмметрической обработки. Давайте сначала рассмотрим эти факторы. В следующем разделе объясняется, почему Paper Airplane выбрала комбинацию DJI и Dronelink.
Экран
Качество получаемых изображений имеет первостепенное значение. Ключевыми элементами камеры для получения высококачественных изображений являются размер матрицы, качество затвора и разрешение.
Чем больше матрица, тем больше динамический диапазон изображения. Это позволяет запечатлеть тусклые или затененные участки в одном и том же кадре в более ярких тонах. Такое освещение часто используется при съемке вокруг высотных зданий. Поскольку при съемке дрон постоянно движется, важно также использовать высококачественный механический затвор, чтобы свести к минимуму размытие и искажение изображения. Кроме того, для уменьшения размытости объекта съемки и фокусировки камеры, особенно в местах, подверженных сильным воздушным потокам, таких как высотные здания, очень важна стабильность изображения.
Точность изображения
При создании 3D-модели знание положения изображения может улучшить качество выходной сетки и сократить время обработки. Однако в плотных городских районах высотные здания могут перекрывать видимость неба (и спутников) и ухудшать качество GPS. В дронах DJI Enterprise-уровня используется кинематика реального времени (RTK) для минимизации ошибок позиционирования в сложных условиях. Приемник RTK дрона может ссылаться на базовую станцию или провайдера NTRIP для повышения точности позиционирования; для получения дополнительной информации о RTK и точности дронов DJI Enterprise перейдите по этой ссылке.
Охват объектов
Высококачественная реконструкция требует, чтобы каждая часть объекта была захвачена с нескольких ракурсов. Для этого необходимо получить NADIR-изображения крыши и всех наружных поверхностей с достаточным перекрытием для обработки. Несколько ракурсов камеры позволяют охватить различные элементы, например, нижнюю часть балконов. При съемке наружных поверхностей поддержание достаточного горизонтального и вертикального перекрытия изображений может быть затруднено, особенно если учесть, что расстояние выборки, угол наклона камеры и размер матрицы камеры влияют на схему полета, необходимую для поддержания перекрытия. Существует
Использование программного обеспечения для управления полетом необходимо для управления всеми параметрами захвата данных как для картографических полетов NADIR, так и для вертикальных картографических полетов. Заданные значения перекрытия и углы наклона камеры могут использоваться для создания автоматизированных миссий с узорчатыми полетами, такими как вертикальные колонны, уложенные горизонтальные траектории, сетка или люки в определенных границах.
Пространственное разрешение/расстояние выборки
Важным фактором, влияющим на качество реконструкции, является разрешение. Более высокое разрешение позволяет детализировать объекты и определять больше мелких элементов в 3D-модели. Разрешение изображения зависит как от технических характеристик камеры, так и от расстояния до объекта съемки. Часто используется термин “разрешение на местности” (GSD). Часто этот термин используется при картографировании земель, в то время как для экстерьеров зданий он называется расстоянием до образца. Разрешение на местности представляет собой размер одного пикселя на изображении, измеренный активом (например, 0,24 см/пиксель).
Разрешение и охват объекта тесно связаны. Определив желаемое расстояние съемки и требуемое разрешение, можно определить расстояние, на котором беспилотник должен находиться от поверхности объекта. Это определяет схему полета, необходимую для поддержания фронтального и бокового перекрытия и обеспечения охвата объекта.
Теперь, когда мы понимаем ключевые элементы создания цифрового двойника, давайте рассмотрим конкретное аппаратное и программное обеспечение, которое может обеспечить выполнение этих требований.
Выбор оборудования
DJI Mavic 3 Enterprise – лучший выбор для масштабируемого аппаратного решения. Этот дрон оснащен большим 4/3-дюймовым сенсором, позволяющим делать снимки с разрешением 20 МП, а его невероятный динамический диапазон позволяет получать самые лучшие изображения. M3E – лучший в своем классе беспилотник, сочетающий большую матрицу с механическим затвором, срабатывающим за 0,7 секунды. Этот быстрый механический затвор обеспечивает высокую скорость полета без ущерба для качества изображения, что позволяет экономить время в полевых условиях. Небольшой форм-фактор делает его простым в управлении, а система камер идеально подходит для всех цифровых сдвоенных работ. Кроме того, длительное время автономной работы (до 45 минут) сокращает необходимость многократной замены батарей во время полета и уменьшает общее количество батарей, необходимых в полевых условиях.

По сравнению с потребительским дроном ( Mavic 2 Pro) с межбарометрическим интервалом в 2 секунды, M3E выполняет задания быстрее и обеспечивает более высокое качество результатов на той же площадке.Mavic 3 Enterprise летает безопасно со сменным RTK-приемником, при этом захватывая данные с дюймовой точностью. Также можно снимать данные с точностью до дюйма.

Оценки миссий от Dronelink показывают, что M3E захватывает одну и ту же площадку в два раза быстрее, чем M2P
Автоматический сбор данных с помощью программного обеспечения для управления полетом
Трудно работать безопасно и обеспечивать полное покрытие объектов с высоким разрешением без автоматизированных средств управления полетом. Для этого проекта компания Paper Airplane использовала Dronelink. Это серия инструментов управления полетом и рабочих процессов, которые создают планы миссий и выполняют их автономно; Dronelink способен выполнять внешние миссии, используемые для вертикального картографирования, и миссии по съемке крыши.

Предварительный просмотр миссииDronelinkдляэтого комбинированного плана миссии для объекта, показывающего сочетание типов миссий внешнего вида и карты
В Dronelink миссии внешнего вида можно легко создавать с помощью ряда ключевых параметров. Входные данные включают.
- Границы видимости (слева/справа, высота, минимальная безопасная высота).
- Вертикальные и горизонтальные перекрытия.
- Используемая поверхность объекта и расстояние объекта от датчика камеры.
- Углы обзора камеры.

Планировщик миссий Dronelink и предварительный 3D-обзор, показывающий одну миссию по созданию видимости, полет вертикальной колонны и параметры настройки.
Миссии внешнего вида могут быть созданы с помощью двух различных рабочих процессов
- Предварительно спланированные миссии на веб-сайте или в мобильном приложении.
- Миссии “на лету”, созданные в полевых условиях с помощью дрона.
Предварительно спланированные миссии по созданию внешнего вида требуют предварительного создания плана миссии с помощью Mission Planner на ноутбуке или в мобильном приложении. Дополнительную информацию см. здесь. После планирования миссии функция географической модификации позволяет скорректировать ее в полевых условиях на основе известной опорной точки, например угла здания. Можно также добавить запретные зоны, чтобы создать запретные для полетов зоны. Обе функции помогают повысить точность и безопасность.
Миссии “Внешний вид на лету” позволяют пилотам визуально отмечать полетные границы, используя положение дрона, и создавать миссии в полевых условиях с такими настройками, как перекрытие камер. Пилотам предлагается отметить ключевые параметры для создания миссии, выполнив ряд подробных шагов в мобильном приложении (см. ниже). Сгенерированные миссии подстраиваются под объект и выполняются по одному заданию, связанному с внешним видом здания. Эта функция позволяет пилоту корректировать план с учетом ограничений окружающей среды, таких как скорость, перекрытие, ограничения по минимальной высоте и другие специфические области.
На этом объекте Paper Airplane выбрал миссию “Экстерьер в полете” для съемки каждого экстерьера с использованием двух разных ракурсов камеры и заранее спланированную миссию “Карта” для крыши.
После запуска миссии по съемке экстерьера на лету пилот управлял дроном вручную и отмечал следующие необходимые ключевые шаги (см. схему ниже)
- Шаг 1: правый угол здания
- Шаг 2: левый угол
- Шаг 3: верхний край
- Шаг 4: минимальная безопасная высота, расстояние до объекта и угол наклона кардана.
- Дополнительные шаги: шаблон и перекрытие (не показаны)

Процедура создания внешней миссии на лету
После ввода всех необходимых данных миссия генерируется и может быть предварительно просмотрена в 3D перед полетом. Затем пилот выбирает ” Старт”, и Dronelink запускает миссию.

Автономный внешний полет с демонстрацией панели смещения дрона.
После выполнения задания пилот может сосредоточиться на наблюдении за дроном и его окружением для обеспечения безопасности. Панель смещения дрона с правой стороны позволяет пилоту в режиме реального времени вносить изменения во время съемки, например, точно регулировать высоту при приближении к препятствиям. Пилот может приостановить и взять управление на себя в любой момент. Последняя позиция сохраняется после ручной паузы и при смене батареи. Пилот может возобновить полет с остановленной позиции, сохраняя непрерывность данных и их перекрытие для последующей обработки.
Посмотреть полное видео (walkthrough) внешней миссии на лету можно здесь.
Для этого проекта Paper Airplane выполнила 12 миссий по съемке внешнего вида и две миссии по съемке карты, чтобы обеспечить полный охват. Для создания необходимого цифрового двойника было выполнено по два полета для каждой внешней поверхности с использованием углов наклона камеры 0° и -20°. Каждый полет выполнялся по вертикальной схеме с вертикальным перекрытием 80 % и горизонтальным перекрытием 80 %; расстояние до объекта съемки составляло 40 футов, что позволяло получить образец размером 0,35 см/пикс.
Для безопасной работы вертикальная схема полета была выбрана вместо горизонтальной. Вертикальные колонны были использованы из-за окружающих зданий и городской среды, а пилот стоял под дроном, в то время как дрон летал вверх и вниз внутри колонн, не позволяя другим людям стоять непосредственно под дроном.
Обработка и анализ данных
После того как данные были сняты на месте, проводится их постобработка; DJI Terra – это доступный локализованный процессор, который позволяет создавать высококачественные 3D-модели; подробнее о процессе создания 3D-моделей с помощью DJI Terra читайте здесь.
При обработке данных не забудьте указать все наземные опорные точки (GCP), которые могли быть использованы; GCP не являются обязательными для создания 3D-моделей, но они помогают в обеспечении абсолютной точности и создании совместных точек. Ручные точки сочленения (MTP) также могут использоваться в процессе обработки для создания плотных 3D-сеток.
После обработки данных для создания 3D-модели конечный пользователь (в данном случае генеральный подрядчик и архитектор) может просмотреть изображения и определить точное местоположение поврежденного или целевого участка на 3D-модели. Эта функция может быть очень полезной при определении областей, требующих внимания. Инструмент измерения помогает определить точное местоположение и размер поврежденного участка и спланировать работы по обслуживанию.



Конечный результат изображения 3D-модели
Заключение
Создание цифровых двойников физических активов с помощью беспилотников и фотограмметрии меняет методы работы организаций во всех отраслях. Предоставление ключевым заинтересованным сторонам онлайн-доступа к цифровым двойникам позволяет сэкономить огромное количество времени, повысить эффективность и оптимизировать внутренние рабочие процессы.
Paper Airplane не только выполнила этот сложный проект, объединив беспилотники DJI Enterprise с программным обеспечением для автоматизированных полетов Dronelink, но и привлекла других лидеров индустрии, осуществляющих цифровую трансформацию в различных отраслях, в результате чего был достигнут впечатляющий результат. Проект дал отличные результаты при содействии других лидеров отрасли, осуществляющих цифровую трансформацию в различных отраслях.


О компании Dronelink
Dronelink – это программное обеспечение для управления полетами дронов, которое обеспечивает автоматизированные миссии, рабочие процессы и инструменты полета для управления дронами DJI. Пилоты могут запускать миссии для картографирования, маршрутных точек, орбит, панорам, вертикального картографирования, инспекций и т. д. с поддержкой Интернета, мобильных устройств и передатчиков, а также использовать такие режимы полета, как орбиты, следование и фокусировка. Несколько миссий можно объединить для автоматизации каждой детали, предварительного просмотра в 3D и использования передовой точности дронов. Для получения дополнительной информации посетите сайт dronelink.com.
О компании Paper Airplane
Paper Airplane – поставщик комплексных услуг в области UAS, предлагающий анализ данных, геодезическую съемку, инспекцию, оценку и профилактическое обслуживание. Продукция компании адаптируется к потребностям отдельных клиентов, что позволяет получать уникальные, эффективные и простые в понимании результаты. Paper Airplane предлагает такие услуги, как геодезическая съемка, внешнее обследование зданий, инспекция инженерных коммуникаций/РОО (радиоактивных органических отходов), обнаружение метана и обследование ливневых стоков/картирование ПМБ.